")
")
Projektā tiek apskatīta zinātnē diskutabla problēma par mehāniskās virzes un rotācijas kustības kopsakarībām, kas noved pie jautājuma, vai izolētā mehāniskā sistēmā, tikai uz tās iekšējo spēku rēķina var panākt šīs sistēmas virzes kustību tādējādi, iespējams, pārkāpjot trešo Ņūtona likumu.
Eksistē dažādi mehānisku iekārtu modeļi, kuros pēc to konstruktoru apgalvojuma, ar tās detaļu iekšējo nevienmērīgo rotācijas kustību palīdzību tiek panākta visas iekārtas virzes kustība. Šādu iekārtu, tās izgudrotājs krievu inženieris V.Tolčins ir nosaucis par "inercoīdu", bet fiziķis-teorētiķis G.Šipovs - par "četru dimensiju žiroskopu".
Projekta izstrādes gaitā ir izdevies uzbūvēt darboties spējīga mehānisma modeli un pārliecināties, ka iepriekš minētais sistēmas masas centra izmaiņas efekts uz tā iekšējo kustību rēķina tiešām reāli pastāv.
2008.gada 23.maijā Krievijas Kosmisko sistēmu institūts ievadīja orbītā mākslīgo zemes pavadoni „Yubileiny”, kura orbītas korekcijas dzinējā ir izmantots „reaktīvās kustības bez masas izmešanas” princips, kas pēc savas būtības ir V.Tolčina inercoīds.
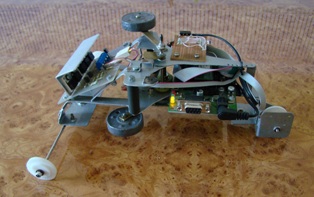
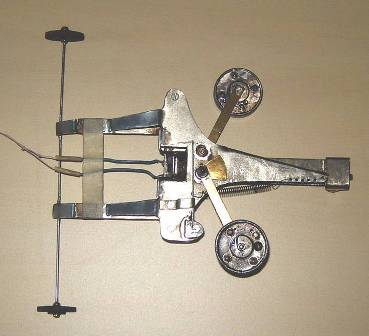
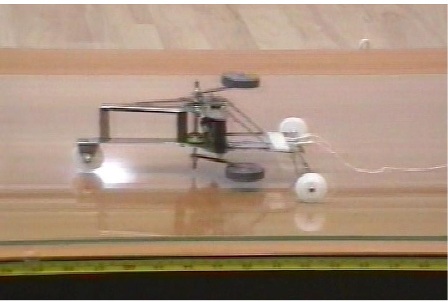
2006. gadā, sākot nodarboties ar inercoīda problēmas pētīšanu tika uzbūvēts vienkāršs eksperimentālais inercoīda modelis, vadoties pēc V.Tolčina grāmatā sniegtajām norādēm un rasējumiem. Par inercoīda dzinēju tika izmantots mazas jaudas līdzstrāvas elektromotors, kura barošanu nodrošināja maināms nestabilizēts līdzsprieguma avots.
Projektā tiek apskatīta zinātnē diskutabla problēma par mehāniskās virzes un rotācijas kustības kopsakarībām, kas noved pie jautājuma, vai izolētā mehāniskā sistēmā, tikai uz tās iekšējo spēku rēķina var panākt šīs sistēmas virzes kustību tādējādi, iespējams, pārkāpjot trešo Ņūtona likumu.
Eksistē dažādi mehānisku iekārtu modeļi, kuros pēc to konstruktoru apgalvojuma, ar tās detaļu iekšējo nevienmērīgo rotācijas kustību palīdzību tiek panākta visas iekārtas virzes kustība. Šādu iekārtu, tās izgudrotājs krievu inženieris V.Tolčins ir nosaucis par "inercoīdu", bet fiziķis-teorētiķis G.Šipovs - par "četru dimensiju žiroskopu".
Projekta izstrādes gaitā ir izdevies uzbūvēt darboties spējīga mehānisma modeli un pārliecināties, ka iepriekš minētais sistēmas masas centra izmaiņas efekts uz tā iekšējo kustību rēķina tiešām reāli pastāv.
2008.gada 23.maijā Krievijas Kosmisko sistēmu institūts ievadīja orbītā mākslīgo zemes pavadoni „Yubileiny”, kura orbītas korekcijas dzinējā ir izmantots „reaktīvās kustības bez masas izmešanas” princips, kas pēc savas būtības ir V.Tolčina inercoīds.
2006. gadā, sākot nodarboties ar inercoīda problēmas pētīšanu tika uzbūvēts vienkāršs eksperimentālais inercoīda modelis, vadoties pēc V.Tolčina grāmatā sniegtajām norādēm un rasējumiem. Par inercoīda dzinēju tika izmantots mazas jaudas līdzstrāvas elektromotors, kura barošanu nodrošināja maināms nestabilizēts līdzsprieguma avots.
 Ar izgatavoto mehānisko ierīci tika veikti izmēģinājumi:
Ar izgatavoto mehānisko ierīci tika veikti izmēģinājumi:
- Inercoīda kustība uz horizontālas nekustīgas virsmas
- Inercoīda kustība uz horizontālas kustīgas virsmas
- Inercoīda kustība uz ūdens
Galvenie secinājumi, kas izrietēja no darbā iegūtajiem rezultātiem bija sekojoši:
- Veicot eksperimentus ar uzbūvēto inercoīda modeli tika iegūta pārliecība, ka inercoīda masas centra izmaiņas efekts uz tā iekšējo kustību rēķina tiešām reāli pastāv.
- Veiktajos eksperimentos tika novērota inercoīda pārvietošanās līdzīgi, kā aprakstīts literatūrā un kā to varēja redzēt interneta lapās ievietotajos videoklipos.
- Eksperimentos iegūtie rezultāti ļāva apšaubīt inercoīda pārvietošanās pamatojumus ar apkārtējās vides berzes vai atgrūšanās efektu palīdzību.
Diemžēl, uzbūvētais visvienkāršākais inercoīda modelis ļāva tikai kvalitatīvi novērot attiecīgo efektu, bet tā kvantitatīvo raksturlielumu noskaidrošanai bija nepieciešams izmantot daudz pilnīgākas iekārtas. Piemēram, lai izpētītu neizkompensētā inerces spēka parametrus būtu jāveic eksperimenti ar elektroniski vadāmu inercoīda modeli, kura visi galvenie raksturlielumi būtu maināmi plašās robežās ar mehānisma pārvietošanās koordinātu, attiecīgo laika momentu un citu rādītāju precīzu reģistrāciju, lai eksperimentālo novērojumu datus salīdzinātu ar teorētiskajiem paredzējumiem.
2007.gadā ar inercoīdu tika veikta virkne jaunu eksperimentu:
- Inercoīda kustība uz stikla plāksnes uz vieglas putuplasta plāksnes,
- Inercoīda kustība pie dažādiem berzes koeficientiem,
- Inercoīds uz Žukovska sola,
- Inercoīda kustība brīvā bezsvara stāvoklī u.c.
Kā arī tika izveidota vienkārša datorsimulācija, par pamatu izmantojot gatavus algoritmus (Newton), kas tiek pielietoti datorspēļu programmēšanai.
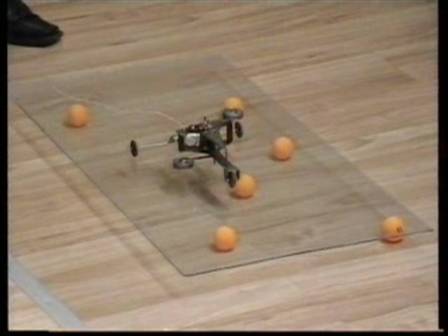
1. Inercoīda kustība uz stikla plāksnes.
Stikla plāksne tika novietota uz sešām plastmasas bumbiņām uz līdzenas grīdas, uz plāksnes novietots inercoīds. Iedarbinot mehānismu, tas pārvietojās visā plāksnes garumā, neatgrūžot plāksni savai kustībai pretējā virzienā.
Šis eksperiments tika atkārtots par virsmu izmantojot krietni vieglāka materiāla – putuplasta plāksni, kuras svars jau bija samērojams ar paša inercoīda svaru. Rezultāts bija iepriekšējais, t.i. – inercoīds pārvietojās visas plāksnes garumā, neatgrūžot to uz pretējo pusi.
.
.
.
.
2. Inercoīda kustība pie dažādiem berzes koeficientiem.
Vairāku autoru (E.Taruņins, N.Gulia u.c.) publikācijās inercoīda kustība tiek skaidrota ar berzes spēku iedarbību. Šādā gadījumā, samazinot berzi starp mehānisma atbalsta riteņiem un virsmu, vajadzētu novērot inercoīda vidējā pārvietojuma samazināšanos, jo atpakaļgājienā noietajam ceļam vajadzētu pamazām izlīdzināties ar gājienā uz priekšu noieto ceļu.
Lai pārliecinātos par berzes spēku ietekmi, tika veikti inercoīda kustības novērojumi pie dažādiem berzes koeficientiem starp mehānisma atbalsta riteņiem un virsmu. Eksperimenta rezultātu apkopojums parādīja, ka samazinot berzes spēku inercoīda pārvietojums viena cikla laikā tikai pieauga, kas bija pretrunā ar sagaidāmo rezultātu.
.
.
.

3. Inercoīds uz Žukovska sola.
Tests uz Žukovska sola (vai līdzīgas rotējošas sistēmas) ir viens no galvenajiem inercoīda entuziastu „klupšanas akmeņiem”. Vairumā skeptiķu darbos tieši šis eksperiments tiek pasniegts par galveno argumentu klasiskās pieejas pamatotībai inercoīda kustības skaidrojumam ar berzes spēku lomu.
Šajā eksperimentā tika veiktas vairākas izmēģinājumu sērijas, kur rezultātā tika novērots, ka pie ļoti maziem berzes spēkiem sistēmas kustības efektivitāte samazinās.
No eksperimenta rezultātu apkopošanas varētu spriest par berzes spēkiem kā inercoīda galveno virzītājspēku. Tomēr, jābūt uzmanīgam ar pārsteidzīgiem secinājumiem, sekojošu iemeslu dēļ:
- Ir novērojamas lielas rezultātu atšķirības dažādiem izmēģinājumiem uz Žukovska sola;
- Ir novērojama liela kvalitatīva atšķirība inercoīda taisnvirziena kustībā uz virsmas un riņķveida kustībā, ko nosaka saite ar solu;
- Vairāki vērā ņemami eksperimentatori (V.Tolčins, G.Šipovs u.c.) apgalvo, ka inercoīds spēj griezt Žukovska solu. Internetā ir atrodams oriģināls V.Tolčina videosižets, kur īpašas konstrukcijas inercoīds griež savu platformu, kas ir novietota uz Žukovska sola.
 4. Inercoīda kustība brīvā bezsvara stāvoklī.
4. Inercoīda kustība brīvā bezsvara stāvoklī.
Šis ir pieskaitāms pie viena no aizraujošākajiem eksperimentiem, lai gan nav devis pārliecinošu rezultātu. Pirms eksperimenta veikšanas inercoīds tika speciāli sagatavots, lai pasargātu to no triecieniem un mehāniskiem bojājumiem. Eksperimenta gaita tika ierakstīta ar videokameru.
Iestājoties bezsvara stāvoklim darbojošs inercoīds tika palaists brīvi planējam telpā. Ar videokameru tika uzfilmēta tā pārvietošanās un vēlāk veikta pārvietošanās analīze.
Eksperimenta rezultāti ļauj spriest, ka apgalvojums, ka inercoīds spēj pārvietot savu masas centru bez mijiedarbības ar apkārtējo vidi tikai uz savu iekšējo spēku rēķina, nav gluži bez pamata. Ir gan jāatzīst, ka šādā veidā iegūtais „bezsvara stāvoklis” ir ļoti īss: ~ 5 sek., kā arī visai nestabils, kas neļauj iegūt zinātniski tīru rezultātu.
Šeit ir vietā atgādināt, ka 2008.gada 23.maijā Krievijas Kosmisko sistēmu institūts ievadīja orbītā mākslīgo zemes pavadoni „ Yubileiny”, kura orbītas korekcijas dzinējā ir izmantots „reaktīvās kustības bez masas izmešanas” princips, kas pēc savas būtības ir V.Tolčina inercoīds. Vai tiešām Krievija būtu „izmetusi” miljonus rubļu, lai uzstādītu un palaistu kosmosā acīm redzami nederīgu dzinēju? Vai tiešām pirms tam nav veikti neskaitāmi tā izmēģinājumi uz zemes?
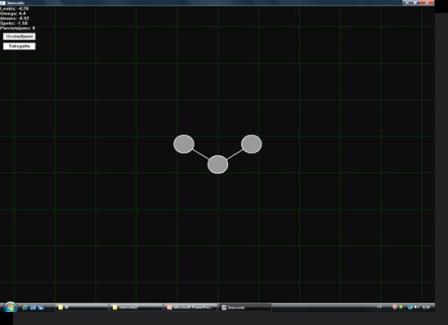 Datorsimulācija. Lai pārliecinātos par inercoīda matemātiskā apraksta pareizību tika izveidota vienkārša datorsimulācija, par pamatu izmantojot gatavus algoritmus (Newton), kas tiek pielietoti datorspēļu programmēšanai.
Datorsimulācija. Lai pārliecinātos par inercoīda matemātiskā apraksta pareizību tika izveidota vienkārša datorsimulācija, par pamatu izmantojot gatavus algoritmus (Newton), kas tiek pielietoti datorspēļu programmēšanai.
Datorsimulācija ļāva uzskatāmi atainot notiekošo mehānisko procesu un izdarīt sekojošus secinājumus:
- inercoīda kustības fenomenu, ja tāds eksistē (bez ārējās berzes) nevar aprakstīt klasiskās Ņūtona mehānikas ietvaros;
- datorsimulācija pareizi attēlo inercoīda kustību viskozas ārējās berzes (vides) apstākļos;
- datorsimulācija apliecina, ka noteiktas sausās jeb Kuloniskās berzes iespaidā inercoīds pārvietojas, taču berzes spēku vērtība nepieciešama par kārtu lielāka, nekā to parāda eksperiments.
2007.gada 26.novembrī eksperimentu rezultāti tika prezentēti LU CFI zinātniskajā seminārā un 2008.gada februārī – 24.zinātniskajā konferencē.
Tālākai inercoīda fenomena izpētei bija nepieciešams pilnveidots iekārtas modelis, kas ļautu veikt kvantitatīvus eksperimentus.
Lai to panāktu, tika nolemts aprīkot esošo inercoīda modeli ar elektroniku – uzstādīt atsvaru rotācijas un iekārtas korpusa pārvietojuma devējus, atteikties no mehāniskās atsvaru paātrināšanas – bremzēšanas sistēmas, aizstājot to ar elektromotora datorizētu vadību. Inercoīda datu pārraide uz eksperimenta kontroles datoru tika nodrošināta ar standarta Bluetooth risinājumu.
Nepieciešamo elektronisko bloku izgatavošanu, kā arī inercoīda darbības programmatūras izstrādāšanu veica firmas „ARDI” speciālisti.
Pa to laiku, kamēr risinājās inercoīda pilnveidošanas procesi es iepazinos ar daudziem internetā atrodamiem citu autoru - kā inercoīdu entuziastu, tā arī skeptiķu darbiem.
Šos materiālus nosacīti varēja sadalīt pa vairākām tēmām:
- Gravitācija – raksti, kas inercoīda fenomenu skaidro ar gravitācijas mijiedarbību vai gravielektromagnētismu (GEM).
- Inerce – inercoīda fenomens tiek skaidrots ar inerces spēku izpausmi.
- Torsioni – pamatā G.Šipova un viņa piekritēju raksti, kas inercoīda kustību skaidro ar jaunu fizikālu lauku eksistenci.
- Mehānika – inercoīda kustība tiek pamatota ar berzes spēkiem, virsmas reakciju un citiem vairāk vai mazāk klasiskiem efektiem.
- Žiroskopi – inercoīda kustība tiek skaidrota ar žiroskopiskiem efektiem.
Kā arī plašāki raksti vai filozofiski apcerējumi par inercoīdu tēmu un raksti, kas tieši nerunā par šo tēmu, bet kuros aprakstītie efekti un veiktie teorētikskie spriedumi var palīdzēt inercoīda fenomena izpētē.
2008.gada novembrī šo pasauli atstāja mans skolotājs un idejiskais iedvesmotājs – prof. Juris Tambergs. Tieši pateicoties viņa izzināšanas kārei un atvērtībai jaunām idejām es uzsāku inercoīda pētīšanas odiseju.
2010.gada beigās izdevās panākt inercoīda puslīdz stabilu darbību, izmantojot pilnībā elektronisku tā darbības režīma vadību. Ar bluetooth starpniecību varēja iegūt datus par inercoīda pārvietojumu un atsvaru kustības vidējo leņķisko ātrumu viena perioda laikā.
 Pirmie iegūtie testa rezultāti ļāva spriest arī par dažām vispārīgām inercoīda kustības īpatnībām:
Pirmie iegūtie testa rezultāti ļāva spriest arī par dažām vispārīgām inercoīda kustības īpatnībām:
- Inercoīds pārvietojas vienmērīgi, katrā ciklā noejot aptuveni vienādus attālumus;
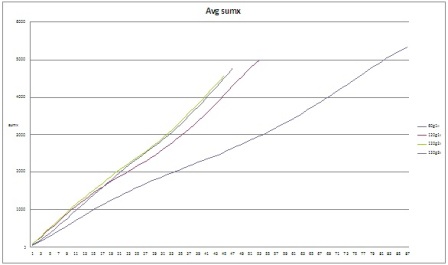
- Palielinot atsvaru masu (no 60g uz 120g), palielinās arī vienā ciklā noietais attālums;
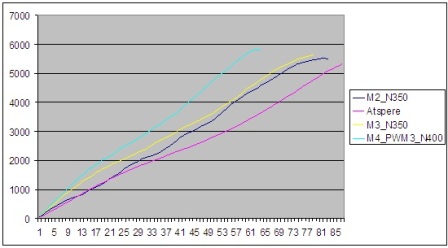 Ieviešot sarežģītāku atsvaru rotācijas regulēšanas algoritmu, izdevās panākt apmierinošu atsvaru rotācijas vidējā ātruma stabilitāti: ~1 – 1,5 apgr/sek intervālā.
Ieviešot sarežģītāku atsvaru rotācijas regulēšanas algoritmu, izdevās panākt apmierinošu atsvaru rotācijas vidējā ātruma stabilitāti: ~1 – 1,5 apgr/sek intervālā.
Paskaidrojums pie grafikiem: uz x-ass ir attēlots ciklu (periodu) skaits, uz y-ass ir atlikts noietais ceļš leņķiskajās vienībās, resp. – 4000 leņķ.vien. atbilst 1000mm, jeb 1m.
Tātad, šobrīd ir sasniegti sekojoši rezultāti:
- Ir izdevies panākt efektīvāku elektroniski vadāmā mehānisma pārvietošanos, salīdzinoši ar atsperes paātrināšanas – bremzēšanas sistēmas izmantošanu;
- Kustība ir relatīvi stabila un vienmērīga, nav nepieciešama eksperimentatora iejaukšanās inercoīda darbības laikā.
Vēl ir nepieciešams uzlabot sistēmas darbības stabilitāti un datu apstrādi, taču jau ar šādu inercoīda modeli var uzsākt vienkāršāko pētījumu veikšanu.
Detalizētus eksperimentu aprakstus lasiet projekta eksperimentu sadaļā "Pētījumi" ar faila nosaukumu: inercoids_petijumi_I (pieejams reģistrētiem lietotājiem)
Dažas interesantas saites:
width=p style=