")
")
2010.gada beigās izdevās panākt inercoīda puslīdz stabilu darbību, izmantojot pilnībā elektronisku tā darbības režīma vadību. Ar bluetooth starpniecību varēja iegūt datus par inercoīda pārvietojumu un atsvaru kustības vidējo leņķisko ātrumu viena perioda laikā.
 Pirmie iegūtie testa rezultāti ļāva spriest arī par dažām vispārīgām inercoīda kustības īpatnībām:
Pirmie iegūtie testa rezultāti ļāva spriest arī par dažām vispārīgām inercoīda kustības īpatnībām:
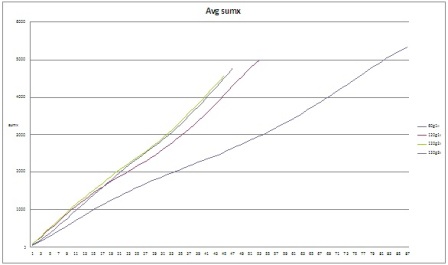
- Inercoīds pārvietojas vienmērīgi, katrā ciklā noejot aptuveni vienādus attālumus;
- Palielinot atsvaru masu (no 60g uz 120g), palielinās arī vienā ciklā noietais attālums;
 Ieviešot sarežģītāku atsvaru rotācijas regulēšanas algoritmu, izdevās panākt apmierinošu atsvaru rotācijas vidējā ātruma stabilitāti: ~1 – 1,5 apgr/sek intervālā.
Ieviešot sarežģītāku atsvaru rotācijas regulēšanas algoritmu, izdevās panākt apmierinošu atsvaru rotācijas vidējā ātruma stabilitāti: ~1 – 1,5 apgr/sek intervālā.
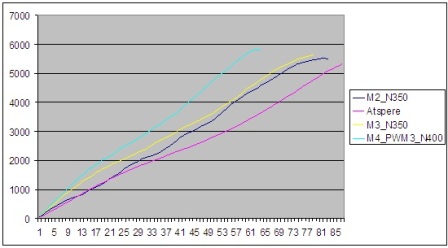
Paskaidrojums pie grafikiem: uz x-ass ir attēlots ciklu (periodu) skaits, uz y-ass ir atlikts noietais ceļš leņķiskajās vienībās, resp. – 4000 leņķ.vien. atbilst 1000mm, jeb 1m.
Tātad, šobrīd ir sasniegti sekojoši rezultāti:
- Ir izdevies panākt efektīvāku elektroniski vadāmā mehānisma pārvietošanos, salīdzinoši ar atsperes paātrināšanas – bremzēšanas sistēmas izmantošanu;
- Kustība ir relatīvi stabila un vienmērīga, nav nepieciešama eksperimentatora iejaukšanās inercoīda darbības laikā.
Vēl ir nepieciešams uzlabot sistēmas darbības stabilitāti un datu apstrādi, taču jau ar šādu inercoīda modeli var uzsākt vienkāršāko pētījumu veikšanu.
Detalizētus eksperimentu aprakstus lasiet projekta eksperimentu sadaļā "Pētījumi" ar faila nosaukumu: inercoids_petijumi_I (pieejams reģistrētiem lietotājiem)
Dažas interesantas saites:
width=p style=
- << Iepriekšējā
- Nākamā